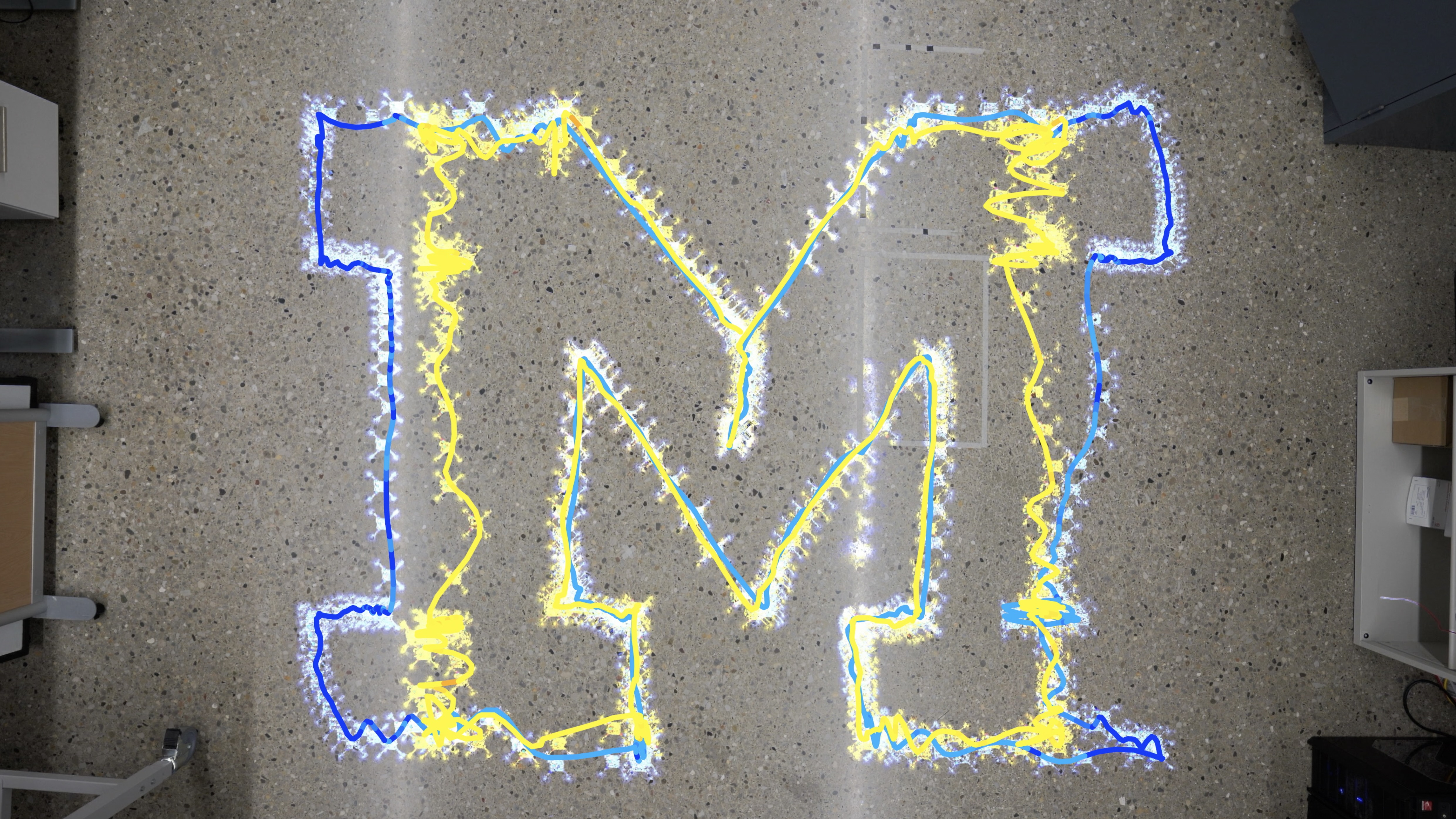
Existing safety control methods for non-stochastic systems become undefined when the system operates outside the maximal robust controlled invariant set (RCIS), making those methods vulnerable to unexpected initial states or unmodeled disturbances. In this work, we propose a novel safety control framework that can work both inside and outside the maximal RCIS, by identifying the worst-case disturbance that can be handled at each state and constructing the control inputs robust to that worst-case disturbance model. We show that such disturbance models and control inputs can be jointly computed by considering an invariance problem for an auxiliary system. Finally, we demonstrate the efficacy of our method both in simulation and in a drone experiment.